1. How Archaios Processes LiDAR and Satellite Data
Archaios uses Python services running in Azure Container Apps to process LiDAR point clouds and fetch satellite imagery. These services are event-driven — they spin up when needed, process data, and scale back to zero when idle.
Here’s the flow:
1
2
3
4
5
6
7
8
9
10
11
12
13
|
User Upload (LiDAR file)
↓
Durable Functions Orchestrator
↓
📮 Azure Storage Queue: "lidar-processing"
↓
🐳 Container App (Python service) - Auto-scales based on queue depth
↓
Processing (PDAL → DSM/DTM/Hillshade)
↓
🔔 Raise External Event back to orchestrator
↓
Continue workflow (Multi-Agent AI analysis)
|
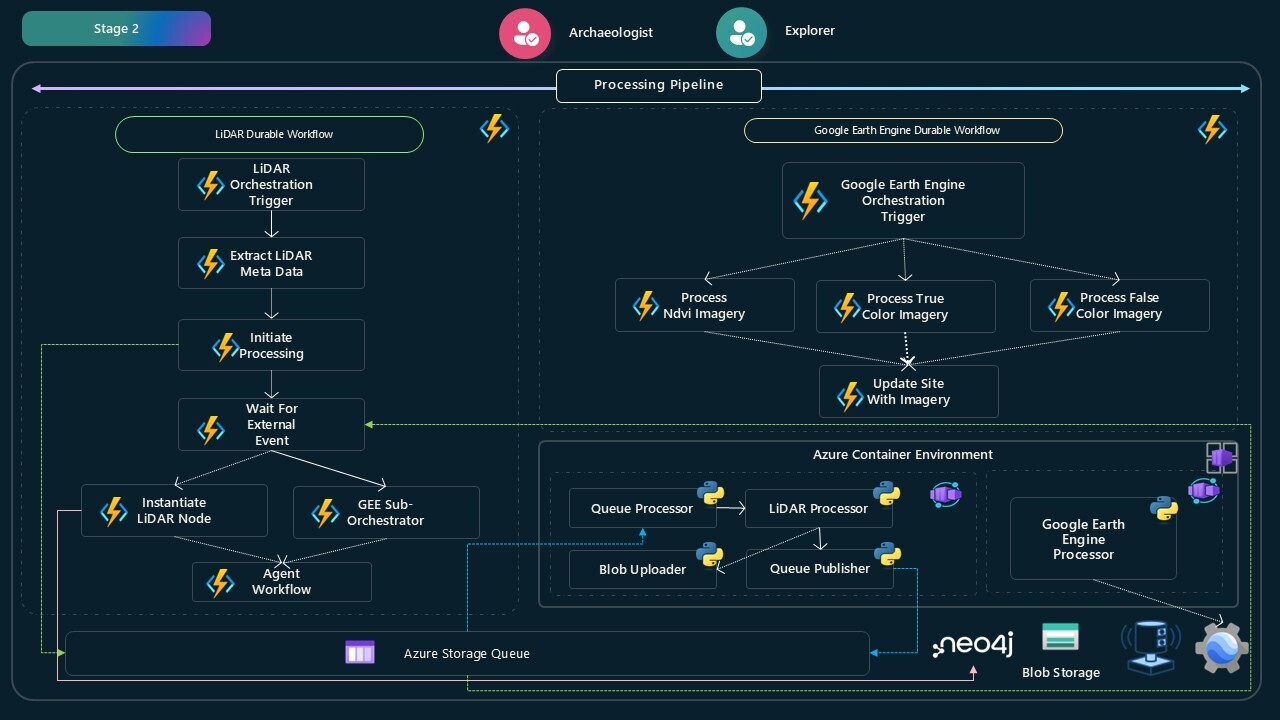
Two Python services run in Container Apps:
🔹 LiDARProcessor - Queue-driven job that processes point clouds (PDAL/GDAL)
🔹 GeeProcessor - HTTP microservice that fetches satellite imagery (Google Earth Engine)
I chose Container Apps because:
- Python services need heavy dependencies (PDAL, GDAL) that don’t fit in Azure Functions
- LiDAR processing takes 8-15 minutes per file (longer than Functions timeout)
- Upload patterns are unpredictable — need auto-scaling that costs $0 when idle
The LiDARProcessor runs as a Container App Job that polls an Azure Storage Queue. When the Durable Functions orchestrator needs to process a LiDAR file, it publishes a message to the queue. The Container App picks it up, processes the file, and raises an event back to the orchestrator.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
|
# main.py - Container App starts here
import asyncio
import logging
import tempfile
from config import AppConfig
from infrastructure.blob_storage import AzureBlobStorage
from infrastructure.queue_storage import AzureQueueStorage
from services.event_service import DurableEventService
from services.lidar_service import LiDARService
async def main():
config = AppConfig.from_env()
temp_dir = tempfile.mkdtemp()
local_mode = config.local_mode
logging.info(f"Starting LiDAR Processing Service in {'local' if local_mode else 'container'} mode")
logging.getLogger('azure.core.pipeline.policies.http_logging_policy').setLevel(logging.WARNING)
# Initialize Azure services
blob_storage = AzureBlobStorage(config.storage_connection)
queue_storage = AzureQueueStorage(config.storage_connection, config.queue_name)
event_service = DurableEventService(config)
# Start LiDAR processing service
lidar_service = LiDARService(
blob_storage,
queue_storage,
event_service,
local_mode=local_mode
)
await lidar_service.run()
if __name__ == "__main__":
asyncio.run(main())
|
The service:
- Reads configuration from environment variables (Container App sets these)
- Initializes connections to Azure Storage (blobs and queues)
- Starts the queue polling loop in
LiDARService.run()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
|
# services/lidar_service.py (simplified)
class LiDARService:
async def run(self):
"""Main processing loop - polls queue and processes messages"""
logger.info(f"Event-driven job started in {'local' if self.local_mode else 'container'} mode.")
while True:
try:
# Get message from queue (visibility timeout: 300s)
message = await self.queue_storage.get_message(visibility_timeout=300)
if message:
await self.process_message(message)
else:
logger.info("No messages in queue. Waiting...")
await asyncio.sleep(10) # Poll every 10 seconds
except Exception as e:
logger.error(f"Error in processing loop: {e}")
await asyncio.sleep(30)
|
Key design:
- Visibility timeout (300s): Message is hidden from other workers for 5 minutes during processing
- Long polling: Sleep 10s if no messages (reduces API calls)
- Continuous loop: Container keeps running until manually stopped
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
async def process_message(self, message):
"""Process a single queue message"""
try:
data = json.loads(message.content)
lidar_blob_url = data["lidarBlobUrl"]
instance_id = data["instanceId"]
logger.info(f"Processing LiDAR file: {lidar_blob_url}")
# Download LiDAR file from blob storage
local_file_path = await self.blob_storage.download_file(lidar_blob_url)
# Generate archaeological outputs using PDAL
results = await self.generate_archaeological_outputs(local_file_path)
# Upload results back to blob storage
output_urls = await self.upload_results(results)
# Notify orchestrator that processing is complete
await self.event_service.raise_event(
instance_id=instance_id,
event_name="LiDARProcessingComplete",
event_data=output_urls
)
# Delete message from queue (success)
await self.queue_storage.delete_message(message)
logger.info(f"✅ LiDAR processing complete for {instance_id}")
except Exception as e:
logger.error(f"❌ Failed to process message: {e}")
# Message will reappear in queue after visibility timeout
|
The processing flow:
- Parse queue message (contains blob URL and orchestration instance ID)
- Download LiDAR file from blob storage
- Run PDAL pipelines to generate DSM, DTM, hillshade, slope
- Upload results back to blob storage
- Call Durable Functions webhook to raise “LiDARProcessingComplete” event
- Delete message from queue
The critical part: how does the Container App tell the orchestrator it’s done?
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
|
# services/event_service.py
import aiohttp
import json
import logging
class DurableEventService:
def __init__(self, config):
self.durable_endpoint = config.durable_functions_endpoint
self.durable_code = config.durable_functions_code
async def raise_event(self, instance_id: str, event_name: str, event_data: dict):
"""
Raises an external event to Durable Functions orchestrator
Args:
instance_id: Orchestration instance ID (from queue message)
event_name: Event name (e.g., "LiDARProcessingComplete")
event_data: JSON-serializable data to send
"""
url = f"{self.durable_endpoint}/runtime/webhooks/durabletask/instances/{instance_id}/raiseEvent/{event_name}"
params = {"code": self.durable_code}
headers = {"Content-Type": "application/json"}
async with aiohttp.ClientSession() as session:
async with session.post(url, params=params, headers=headers, json=event_data) as response:
if response.status == 202:
logging.info(f"✅ Event '{event_name}' raised for instance {instance_id}")
else:
logging.error(f"❌ Failed to raise event: {response.status}")
|
The Container App calls the Durable Functions webhook to unblock the orchestrator.
Back in the orchestrator (from Blog 1):
1
2
3
4
|
// Orchestrator waits for Container App to finish
var lidarResult = await context.WaitForExternalEvent<LiDARProcessingResult>("LiDARProcessingComplete");
_logger.LogInformation($"Received LiDAR processing results: {lidarResult.DsmUrl}");
|
This is decoupled communication: Container App doesn’t know about orchestration logic — it just raises an event with results.
LiDAR processing requires PDAL and GDAL — native C++ libraries. Docker makes this easy:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
|
FROM python:3.11-slim
ENV PYTHONDONTWRITEBYTECODE=1
ENV PYTHONUNBUFFERED=1
WORKDIR /app
# Install system dependencies for PDAL/GDAL
RUN apt-get update && apt-get install -y \
gcc \
g++ \
libgdal-dev \
&& rm -rf /var/lib/apt/lists/*
# Install Python dependencies
COPY requirements.txt .
RUN pip install --upgrade pip && pip install -r requirements.txt
# Copy application code
COPY . .
# Run the service
CMD ["python", "main.py"]
|
What’s included:
python:3.11-slim - Minimal base imagegcc and g++ - Required to compile PDAL Python bindingslibgdal-dev - GDAL library for geospatial operations- No
EXPOSE directive - Container App Jobs don’t listen on ports
The GeeProcessor is different — it runs as a long-running HTTP microservice instead of a queue job.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
# main.py for GEE Processor
from fastapi import FastAPI, BackgroundTasks
from processors.gee_processor import GeeProcessor
import uvicorn
app = FastAPI(title="Archaios GEE Processor")
@app.post("/process/ndvi")
async def process_ndvi(request: ProcessRequest, background_tasks: BackgroundTasks):
"""Generate NDVI satellite imagery"""
processor = GeeProcessor()
result = await processor.process_ndvi(
center_lat=request.latitude,
center_lon=request.longitude,
instance_id=request.instance_id
)
return result
@app.post("/process/truecolor")
async def process_truecolor(request: ProcessRequest):
"""Generate TrueColor satellite imagery"""
# Similar pattern...
if __name__ == "__main__":
uvicorn.run(app, host="0.0.0.0", port=8000)
|
Why HTTP instead of queue?
The Durable Functions orchestrator calls three GEE endpoints in parallel:
/process/ndvi - Vegetation stress analysis/process/truecolor - Visual context imagery/process/falsecolor - Infrared composite
Using HTTP means:
- Immediate response (no queue delay)
- Parallel processing (all three requests at once)
- Stateless design (each request is independent)
The Dockerfile for GEE Processor:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
|
FROM python:3.11-slim
ENV PYTHONDONTWRITEBYTECODE=1
ENV PYTHONUNBUFFERED=1
WORKDIR /app
# Install system dependencies
RUN apt-get update && apt-get install -y \
gcc \
libgdal-dev \
curl \
&& rm -rf /var/lib/apt/lists/*
# Install Python dependencies
COPY requirements.txt .
RUN pip install --upgrade pip && pip install -r requirements.txt
# Copy application code
COPY . .
# Copy Google Earth Engine service account credentials
COPY gee-service-account.json .
# Expose HTTP port
EXPOSE 8000
# Run FastAPI server
CMD ["python", "main.py"]
|
Key differences:
EXPOSE 8000 - Container accepts HTTP trafficgee-service-account.json - GEE authentication file- FastAPI + Uvicorn - Production ASGI server
Container Apps auto-scale based on queue depth for the LiDAR processor:
1
2
3
4
5
6
7
8
9
10
11
12
|
# LiDAR Processor scaling config
scale:
minReplicas: 0 # Scale to zero when queue is empty
maxReplicas: 10 # Max 10 concurrent processors
rules:
- name: queue-scaling
azureQueue:
queueName: lidar-processing
queueLength: 5 # Trigger new replica every 5 messages
auth:
- secretRef: storage-connection-string
triggerParameter: connection
|
How this works:
- 0 messages in queue → 0 replicas running (costs $0)
- 1-5 messages → 1 replica spins up
- 6-10 messages → 2 replicas
- 50+ messages → 10 replicas (max)
Each replica processes 1 message at a time and takes ~8 minutes per LiDAR file.
For the GEE Processor (HTTP microservice):
1
2
3
4
5
6
7
8
|
# GEE Processor scaling config
scale:
minReplicas: 1 # Always 1 instance running
maxReplicas: 5 # Max 5 concurrent instances
rules:
- name: http-scaling
http:
concurrentRequests: 10 # Scale when >10 requests/instance
|
I keep minReplicas: 1 for the GEE service because:
- The orchestrator calls it in parallel (NDVI + TrueColor + FalseColor)
- Cold start delay would slow down the entire workflow
- Cost is minimal (~$15/month for 1 replica)
Container Apps send logs to Azure Monitor automatically:
1
2
3
4
5
6
7
8
9
10
11
12
13
|
# services/lidar_service.py
import logging
logger = logging.getLogger(__name__)
async def process_message(self, message):
logger.info(f"📥 Received message: {message.id}")
try:
# Processing logic...
logger.info(f"✅ Processing complete")
except Exception as e:
logger.error(f"❌ Processing failed: {e}", exc_info=True)
|
In the Azure Portal, you can:
- Stream live logs during development
- Query logs with KQL (Kusto Query Language)
- Set up alerts (e.g., email when failures > 5 in 10 minutes)
- See CPU/memory metrics for each replica
Blog 8: [Full-Stack Integration - Upload to Discovery] - How all Archaios components work together in an end-to-end archaeological discovery workflow.
- LiDAR Processor:
Archaios.AI.LiDARProcessor/ (Python service + Dockerfile)
- GEE Processor:
Archaios.AI.GeeProcessor/ (FastAPI microservice + Dockerfile)
- Queue Integration:
Archaios.AI.DurableHandler/FxDurableOrchestrator.cs (publishes queue messages)
- Event Service:
Archaios.AI.LiDARProcessor/services/event_service.py (raises Durable Functions events)
All code examples in this blog are from the actual Archaios production codebase.
Container Apps bring serverless benefits without the limitations — no time limits, full Python ecosystem, and queue-driven auto-scaling. Perfect for batch processing workloads like LiDAR and satellite data.
#AzureContainerApps #Python #Docker #EventDriven #Microservices #PDAL #GoogleEarthEngine #MicrosoftMVP

